လွ်ပ္စစ္ေမာ္တာမ်ားကို အၾကမ္းအားၿဖင့္ ၃ မ်ိဳးခြဲၿခားနုိင္သည္။
က) AC induction Motors
ခ) DC Motors
င) Synchronous Motors
ACMV တြင္ အသံုးမ်ားေသာ လွ်ပ္စစ္ေမာ္တာမ်ားမွာ AC
induction Motors မ်ားၿဖစ္ၾကသည္။ ထုိေၾကာင့္ ACMV
အင္ဂ်င္နီယာတစ္ေယာက္ေနၿဖင့္ AC induction Motors မ်ားကို
ေသးစိတ္ေလ့လာရန္လိုအပ္သည္။
AC induction Motors မ်ားကို Squirrel Cage Motors AC
induction Motors ႏွင့္ Wound Rotor AC induction Motors
ဟု၍ႏွစ္မ်ိဳးကြဲၿပားသည္။
ခ) DC Motors
င) Synchronous Motors
| Squirrel Cage Motors AC induction Motors | Wound Rotor AC induction Motors |
| Wound Rotor ထက္ ေစ်းႏွဳန္းသက္သာသည္။ (ေမာ္တာအရြယ္တူၿခင္းနုိင္းယွဥ္လွ်င္) | Squirrel Cage Motors ထက္ ေစ်းႏွဳန္းမ်ားသည္။ (ေမာ္တာအရြယ္တူၿခင္းနုိင္းယွဥ္လွ်င္) |
| ၿပဳၿပင္ထိန္းသိမ္းခနည္းသည္။(low maintenance) | ၿပဳၿပင္ထိန္းသိမ္းခမ်ား သည္။ |
| High realibility | Excellent Speed Control - လုိအပ္သည့္ ေမာ္တာလည္ပတ္ကို ရရွိနုိင္သည္။ |
| A farily Wide rage of torque and slip charactireistic ကိုဝယ္ယူရရွိနုိင္သည္။ |
High Starting Torque- ေမာ္တာစတင္ေမာင္းႏွင္ခ်ိန္တြင္ အားေကာင္းေသာ Torque ကို ရရွိနုိင္သည္။ Low Starting current ေမာ္တာစတင္ေမာင္းႏွင္ရန္အတြက္ အနည္းငယ္ေသာ current သာလုိအပ္သည္။ |
| Albe to handle High -inertia Load ကိုေမာင္းရန္အတြက္သင့္ေလွ်ာ္သည္။ | |
| Albe to handle frequent Stats and Stops အခ်ိန္အနည္းငယ္အတြင္းတြင္ အခါမ်ားစြာ စေမာင္းၿခင္း။ ရပ္နားၿခင္းၿပဳလုပ္ရန္လုိအပ္ေသာ လုပ္ငန္မ်ားအတြက္သင့္ေလွ်ာ္သည္။ | |
| Albe to handle reduced speed (low speed) for long periods ေမာ္တာလည္ပတ္နွန္းကို ေလွ်ာ့နည္းၿပီးအခ်ိန္ၾကာၿမင့္စြာ ေမာင္းရန္အတြက္သင့္ေလွ်ာ္သည္။ |
AC induction Motors ေမာ္တာမ်ားသည္
အသံုးၿပဳသည့္လွ်ပ္စစ္ဓါတ္အားေပၚတြင္မူတည္၍ ွSingle Phase ေမာ္တာ ႏွင့္
Single Phase ေမာ္တာ ဟု၍ကြဲၿပားသည္။
AC လွ်ပ္စစ္ေမာ္တာ၏လည္ပတ္နွန္းမ်ား
| (120 x Frequency ) | ||
| Synchronous Speed (rpm) | = -------------------------- | |
| Number of poles |
Synchronous Speed (rpm)သည္ သီအိုရီအရ
သို့တြက္ခ်က္မွဳအရ အၿမင့္ဆံုးၿဖစ္နုိင္သည့္ လည္ပတ္နွန္းၿဖစ္သည္။ AC
လွ်ပ္စစ္ေမာ္တာ၏ အၿမင့္ဆံုးလည္ပတ္နွန္း သုိ့ Synchronous Speed မွာ
ယင္းေမာ္တာကို ေပးသည့္ AC လွ်ပ္စစ္္ဓါတ္အား၏ Frequency ႏွင့္
ယင္းေမာ္တာကိုတည္ေဆာက္ထားသည့္ Number of poles မ်ား၏
ေရအတြက္ေပၚတြင္မူတည္သည္။
ဥပမာ(၁) စင္ကာပူနုိင္ငံတြင္ေမာင္းသည့္ 4 poles ေမာ္တာတစ္လံုး၏ Synchronous Speed (rpm) မွာ တစ္မိနစ္လွ်င္ အပတ္ေရ ၁၅၀၀ ၿဖစ္သည္။ အဘယ္ေၾကာင့္ဆုိေသာ္ စင္ကာပူနုိင္ငံ၏ AC လွ်ပ္စစ္္ဓါတ္အား၏ Frequencyမွာ 50 Hz ၿဖစ္ေသာေၾကာင့္ၿဖစ္သည္။
| (120 x Frequency=50 ) | ||
| Synchronous Speed (rpm) | = -------------------------- | = 1500 rpm |
| Number of poles=4 |
ဥပမာ(၁) ထုိင္းနုိင္ငံတြင္ေမာင္းသည့္ 2 poles ေမာ္တာတစ္လံုး၏ Synchronous Speed (rpm) မွာ တစ္မိနစ္လွ်င္ အပတ္ေရ ၃၆၀၀ ၿဖစ္သည္။ အဘယ္ေၾကာင့္ဆုိေသာ္ ထုိင္းနုိင္ငံ၏ AC လွ်ပ္စစ္္ဓါတ္အား၏ Frequencyမွာ 60 Hz ၿဖစ္ေသာေၾကာင့္ၿဖစ္သည္။
| (120 x Frequency=60 ) | ||
| Synchronous Speed (rpm) | = -------------------------- | = 3600 rpm |
| Number of poles=2 |
Slip (ေမာ္တာအတြင္းစလစ္ၿဖစ္မွဳမ်ား)
AC လွ်ပ္စစ္ေမာ္တာ မ်ားသည္ load (ဝန္) ႏွင့္ေမာင္းသည့္အခါ ၏လည္ပတ္နွန္းမ်ား ေမာ္တာအတြင္းစလစ္ၿဖစ္မွဳမ်ား(Slip)မ်ားၿဖစ္ေပၚသည္။ ထုိအခါ ဝန္ႏွင့္ေမာင္းေနသည့္ လည္ပတ္နွန္း သည္ Synchronous Speed (rpm) ေလ်ာ့နည္းသည္။ (ဝန္ႏွင့္ေမာင္းေနသည့္ လည္ပတ္နွန္း ကုိ Actual Speed ဟုေခၚသည္။) ထုိေလ်ာ့နည္းမွဳ သို့ ထုိကြာဟခ်က္ကို Slip ဟုေခၚသည္။
ေမာ္တာအတြင္းတြင္ Rotor ႏွင့္ Stator ဟု၍ရွိသည္။ AC လွ်ပ္စစ္္ဓါတ္အားသည္ Stator အတြင္းတြင္သာၿဖစ္သန္းစီးဆင္းသည္။ Rotor အတြင္း၍လံုးဝၿဖစ္သန္းစီးဆင္းၿခင္းမရွိေပ။ Magnetic Field မ်ားသည္ လည္ပတ္နွန္းႏွစ္ခုကြာဟခ်က္ေၾကာင့္သာၿဖစ္ေပၚလာနုိင္သည္။ တနည္း Magnetic Field ၿဖစ္ေပၚ ရန္ AC induction ေမာ္တာတုိင္းတြင္ Slip ၿဖစ္ေပၚသည္။
ေယဘူယအားၿဖင့္ AC induction ေမာ္တာတုိင္းတြင္ Slip ၅%ရွိသည္။ တနည္း Actual Speed ( at Full load) သည့္ Synchronous Speed (rpm) ထက္ ၅%ေလ်ာ့နည္းသည္။
သုိ့ေသာ္ High Starting Torque လုိအပ္သည့္ေမာ္တာမ်ားတြင္ Slip သည္ ၂၀% အထိရွိတတ္သည္။
Slip = Synchronous Speed (rpm) - Actual Speed(rpm)
AC လွ်ပ္စစ္ေမာ္တာ မ်ားသည္ load (ဝန္) ႏွင့္ေမာင္းသည့္အခါ ၏လည္ပတ္နွန္းမ်ား ေမာ္တာအတြင္းစလစ္ၿဖစ္မွဳမ်ား(Slip)မ်ားၿဖစ္ေပၚသည္။ ထုိအခါ ဝန္ႏွင့္ေမာင္းေနသည့္ လည္ပတ္နွန္း သည္ Synchronous Speed (rpm) ေလ်ာ့နည္းသည္။ (ဝန္ႏွင့္ေမာင္းေနသည့္ လည္ပတ္နွန္း ကုိ Actual Speed ဟုေခၚသည္။) ထုိေလ်ာ့နည္းမွဳ သို့ ထုိကြာဟခ်က္ကို Slip ဟုေခၚသည္။
ေမာ္တာအတြင္းတြင္ Rotor ႏွင့္ Stator ဟု၍ရွိသည္။ AC လွ်ပ္စစ္္ဓါတ္အားသည္ Stator အတြင္းတြင္သာၿဖစ္သန္းစီးဆင္းသည္။ Rotor အတြင္း၍လံုးဝၿဖစ္သန္းစီးဆင္းၿခင္းမရွိေပ။ Magnetic Field မ်ားသည္ လည္ပတ္နွန္းႏွစ္ခုကြာဟခ်က္ေၾကာင့္သာၿဖစ္ေပၚလာနုိင္သည္။ တနည္း Magnetic Field ၿဖစ္ေပၚ ရန္ AC induction ေမာ္တာတုိင္းတြင္ Slip ၿဖစ္ေပၚသည္။
ေယဘူယအားၿဖင့္ AC induction ေမာ္တာတုိင္းတြင္ Slip ၅%ရွိသည္။ တနည္း Actual Speed ( at Full load) သည့္ Synchronous Speed (rpm) ထက္ ၅%ေလ်ာ့နည္းသည္။
သုိ့ေသာ္ High Starting Torque လုိအပ္သည့္ေမာ္တာမ်ားတြင္ Slip သည္ ၂၀% အထိရွိတတ္သည္။
Slip = Synchronous Speed (rpm) - Actual Speed(rpm)
ဥပမာ 2 poles ေမာ္တာ တစ္လံုးသည္ 50 Hz လွ်ပ္စစ္ ပါဝါ
ႏွင့္ေမာင္းသည့္ အခါ လည္ပတ္ေရ ၂၉၀၀ ဟုတုိင္းတာရရွိလွ်င္ Slip
မည္မွ်ၿဖစ္သည္ကိုရွာပါ။
50 Hz လွ်ပ္စစ္ ပါဝါ ႏွင့္ေမာင္းသည့္2 poles ေမာ္တာ တစ္လံုး၏ Synchronous Speed (rpm) မွာ ၃၀၀၀ ၿဖစ္သည္။
Slip = Synchronous Speed (rpm)မွာ ၃၀၀၀ - Actual Speed(rpm) မွာ ၂၉၀၀ = ၁၀၀ rpm ၿဖစ္သည္။
50 Hz လွ်ပ္စစ္ ပါဝါ ႏွင့္ေမာင္းသည့္2 poles ေမာ္တာ တစ္လံုး၏ Synchronous Speed (rpm) မွာ ၃၀၀၀ ၿဖစ္သည္။
Slip = Synchronous Speed (rpm)မွာ ၃၀၀၀ - Actual Speed(rpm) မွာ ၂၉၀၀ = ၁၀၀ rpm ၿဖစ္သည္။
Motor Torque Speed Curves
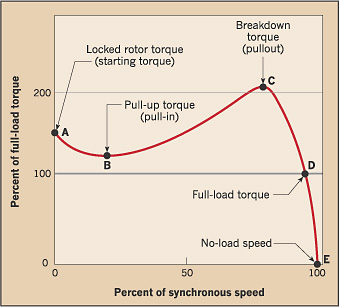
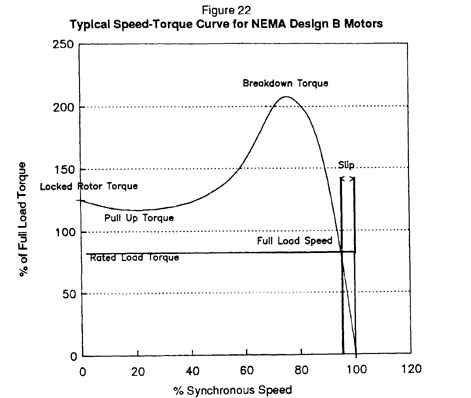
ပံုတြင္ၿပထားသည့္ Motor Torque Speed Curves တြင္ Point A, B, C, D, E တုိ့ကို နားလည္ရန္လုိအပ္ပါသည္။
X ဝင္ရုိးသည္ Synchronous Speed ကို % ၿဖင့္ေဖာ္ၿပထားၿပီး Y ဝင္ရုိးသည္ Full load Torque (Rated Torque) ကို % ၿဖင့္ေဖာ္ၿပထားသည္။ 50 Hzလွ်ပ္စစ္ဓါတ္အားၿဖင့့္ေမာင္းသည္ 4 pole ေမာ္တာ ၏ ၁၀၀% Synchronous Speed မွာ တစ္မိနစ္လွ်င္ အပတ္ေရ ၁၅၀၀ ၿဖစ္သည္။ ထုိေမာ္တာ၏ ၁၀၀% Full load Torque (Rated Torque) မွာ ေမာ္တာ၏ၿမင္းေကာင္ေရအားေပၚတြင္မူတည္သည္။
ပံုတြင္ၿပထားသည့္ Motor Torque Speed Curves တြင္ Point A, B, C, D, E တုိ့ကို နားလည္ရန္လုိအပ္ပါသည္။
X ဝင္ရုိးသည္ Synchronous Speed ကို % ၿဖင့္ေဖာ္ၿပထားၿပီး Y ဝင္ရုိးသည္ Full load Torque (Rated Torque) ကို % ၿဖင့္ေဖာ္ၿပထားသည္။ 50 Hzလွ်ပ္စစ္ဓါတ္အားၿဖင့့္ေမာင္းသည္ 4 pole ေမာ္တာ ၏ ၁၀၀% Synchronous Speed မွာ တစ္မိနစ္လွ်င္ အပတ္ေရ ၁၅၀၀ ၿဖစ္သည္။ ထုိေမာ္တာ၏ ၁၀၀% Full load Torque (Rated Torque) မွာ ေမာ္တာ၏ၿမင္းေကာင္ေရအားေပၚတြင္မူတည္သည္။
Point “A” Locked rotor torque သုိ့ Starting Torque ( Startup Torque)
Locked rotor torque ကို Starting Torque ဟုလည္းေခၚသည္။ Speed =0 မွာရရွိနုိင္ေသာ torque ဟုလည္းမွတ္ယူနုိင္သည္။ ေမာ္တာဒီဇုိင္းကြာလွ်င္ Locked rotor torque သုိ့ Starting Torque လည္းကြာသည္။ Conveyor တြင္သံုးၿပဳမည့္ ေမာ္တာသည္ အလြန့္ ၿမင့္မားေသာ Starting Torque ရွိရန္လုိအပ္သည္။ ပန္ကာမ်ားႏွင့္ ေရပန့္မ်ားတြင္အသံုးၿပဳသည့္ ေမာ္တာမ်ားသည္ အလြန္ၿမင့္မားေသာ Starting Torque ရွိရန္မလုိအပ္ပါ။ Locked rotor torque သည္ Full Load torque ထက္ ၂၀% မွ ၃၀% အထိမ်ားေလ့ရွိသည္။
Point “B” Pull-up Torque သို့ Pull-in Torque
Pull-up Torque သည္ ေမာ္တာတစ္လံုး၌ၿဖစ္ေပၚနုိင္ေသာ လုိအပ္သည္ အပတ္ေရသို့ေရာက္ေအာင္ အရွိန္ယူေနခ်ိန္တြင္ၿဖစ္ေပၚေသာ အနိမ့္ဆံုး Torque ( Minimum Torque) ၿဖစ္သည္။ ေမာ္တာတစ္လံုးသည္ စတင္လည္ပတ္ၿပီး အရွိန္ယူေနခ်ိန္တြင္ အနည္းဆံုးေသာ Minimum Torque ကို ေပးသည္။ Pull-up Torque သည္ Synchronous Speed၏ 20% မွ 40% အတြင္းၿဖစ္ေပၚေလ့ရွိသည္။
Point “C” Breakdown Torque သို့ Pull out Torque
Breakdown Torque သည့္ ေမာ္တာတစ္လံုး၏ အၿမင့္ဆံုး (Maximum) Torque ၿဖစ္သည္။ Breakdown Torque သည္ Full load torque ထက္၂ ဆခန့္ မ်ားသည္။
Point “D” Full load Torque
Full load Torque သည္ ေမာ္တာတစ္လံုး၏ Actual Speed တြင္ ရရွိနုိင္ေသာ Torque ၿဖစ္သည္။ Actual Speed သည္ ေမာင္းေနေသာ ထုိေမာ္တာ၏ load (ဝန္အား) ေပၚတြင္မူတည္သည္။ load မ်ားလွ်င္ Slip ၿဖစ္ေပၚမွဳလည္းမ်ားသည္။ ထုိေၾကာင့္ Actual Speed နည္းသည္။ အဘယ္ေၾကာင့္ဆုိေသာ္ Actual Speed သည္ Synchronous Speed မွ Slip ကို နဳတ္ထားေသာေၾကာင့္ၿဖစ္သည္။
Actual Speed = Synchronous Speed – Slip
Full load Torque သည္ ေမာ္တာတစ္လံုး၏ Actual Speed တြင္ ရရွိနုိင္ေသာ Torque ၿဖစ္သည္။ Actual Speed သည္ ေမာင္းေနေသာ ထုိေမာ္တာ၏ load (ဝန္အား) ေပၚတြင္မူတည္သည္။ load မ်ားလွ်င္ Slip ၿဖစ္ေပၚမွဳလည္းမ်ားသည္။ ထုိေၾကာင့္ Actual Speed နည္းသည္။ အဘယ္ေၾကာင့္ဆုိေသာ္ Actual Speed သည္ Synchronous Speed မွ Slip ကို နဳတ္ထားေသာေၾကာင့္ၿဖစ္သည္။
Actual Speed = Synchronous Speed – Slip
Point “E” Synchronous Speed သို့ No Load Speed သို့ Zeor Torque Speed
Synchronous Speed သို့ No Load Speed သည့္ Load မရွိသည့္ၿဖစ္ေပၚနုိင္ေသာ Torque ၿဖစ္သည္။
Synchronous Speed သို့ No Load Speed သည့္ Load မရွိသည့္ၿဖစ္ေပၚနုိင္ေသာ Torque ၿဖစ္သည္။
Torque and Horse Power
Power (W) = Torque (Nm) x Angular Speed (Radians per Second) = Torque (Nm) x 2 x 3.14 x rpm/60
1 hp =746 W = 0.746kW
Motor Insulation
NEMA motor insulation calss accoring to Max Operating Temperature
| Insulation Class | Max Operating Temp (C) | Allowable Temp Raise at Full load for Service Factor 1.0 motor (C) | Hot Spot allowance (C) |
A
|
105 | 60 | 5 |
B
|
130 | 80 | 10 |
F
|
155 | 105 | 10 |
H
|
180 | 125 | 15 |
Allowable Temp raise သည္ ၿပင္ပေလထုအပူခ်ိန္ 40C ကုိ အေၿခခံထားသည္။
50 Hz ေမာ္တာမ်ားအမ်ားစု၏ Insulation Class မွာ F ၿဖစ္သည္။ ACMV တြင္အသံုးၿပဳေသာ motor အမ်ား၏ Insulation Class မွာ F ၿဖစ္သည္။
- Class A is the lowest grade, suitable for typical household appliances, but not normally industrial applications.
- Class B is general purpose, used in many industrial applications. More demanding duty requires Class F or Class H.
- Class H is the heavy-duty insulation, capable of withstanding high ambient and internal motor temperatures.
ေကာင္းထက္ညြန့္

No comments:
Post a Comment
အခုလို လာေရာက္အားေပးၾကတာ အထူးပဲ ၀မ္းသာ ပီတိျဖစ္ရပါတယ္ဗ်ား ... ။ေက်းဇူးအထူးတင္ပါတယ္။
ေက်ာ္ထက္၀င္း နည္းပညာ (ဘားအံ)
www.kyawhtetwin.blogspot.com